




 Qzone
Qzone
 微博
微博
 微信
微信

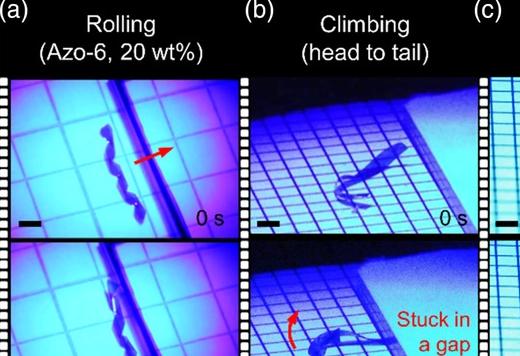
图源:论文截图
在软体机器人中展示光诱导的运动,以往有研究报告了爬行和行走的运动,观察到运动时产生大的摩擦。近日,圆柱形和多圈螺旋形软体机器人的滚动运动已面世,它通过采用滚动阻力来减少摩擦,很像车轮。然而,滚动并不是我们在日常生活中所经历的爬楼梯有效策略。
于是,研究人员更进一步,实现了单圈螺旋形软体机器人的扭转运动,使单位长度的螺旋直径最大化,这个因素与软体机器人能够克服障碍物的高度密切相关。
在单圈螺旋形的情况下,在地面上滚动的扭转软体机器人只接触到一个点和两个点,而软体机器人的单端能够伸过障碍物。通过这些观察,很明显,单圈螺旋线将是一个有效的设计,它可以最大限度地减少滚动阻力,同时最大限度地提高软体机器人的高度到达率。
为了克服障碍,扭转式软体机器人需要在一个接触点上抬起整个身体。分子工程使研究人员能够展示阶梯式攀登的扭转式软体机器人,以及在轻质的身体重量(0.2毫克)内实现大的每体长度速度(0.15 BL/s)。
通过研究七种不同的偶氮苯基分子开关,以对分子排列和交联密度进行编程,作为液态结晶聚合物。通过改变分子开关的分子长度,研究人员可以在不增加悬空链的情况下控制交联密度。因此,高杨氏模量(>2 GPa)和光生应力(>1 MPa)都能实现。这有助于软体机器人保持较高的线圈高度,并使其能够在基底上用一个接触点举起整个身体。
研究人员还优化了粘弹性软体机器人的温度条件与玻璃化温度的关系。在玻璃状态下,软体机器人的速度在较高的温度下增加,因为较软的材料更容易进行形状的重新配置。然而,在橡胶状态下观察到的情况恰恰相反。在太高的温度下,软体机器人不能产生足够的应力和消散光生的应力,这说明了粘弹性在聚合物基软体机器人中的重要性。
通过这项研究工作,新的扭转型软体机器人设计,可以增强软体机器人驱动力,或高伸长率的应用潜力,还可以增强对光驱动软体机器人的结构-性能关系的基本认识。
题为Light-Fueled Climbing of Monolithic Torsional Soft Robots via Molecular Engineering的相关研究论文发表在《先进智能系统》上。
前瞻经济学人APP资讯组
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)








泡泡网2022-05-24 20:3905-24 20:39

泡泡网2022-05-24 20:3505-24 20:35

泡泡网2022-05-24 19:4805-24 19:48

南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5705-24 17:57






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>


















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报