




 Qzone
Qzone
 微博
微博
 微信
微信

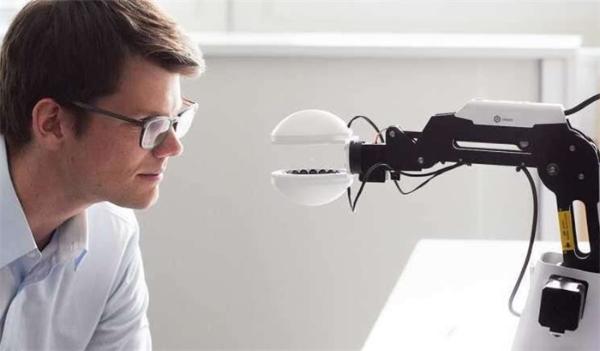
图片来源:ETH Zürich / Stefan Weiss
ETH的先驱研究员Marcel Schuck正在研发一种机器人夹持器,这种夹持器可以在不接触小而易碎的物体的情况下操纵它们。这项技术是基于声波。
Marcel Schuck在他的工作台上组装的小装置让人想起了学校的一节物理课:一个由两个半球体组成的装置,类似于一对耳机,连接到一个携带微芯片的电路板上。他正在用这个装置演示物理效果。一个小球体悬浮在两个半球体之间,由超声波支撑。“这种现象被称为声悬浮。”他解释说。
作为在联邦理工学院的研究项目的一部分,这位前联邦理工学院博士生目前正在开发一种方法,可以完全举起和操纵小物体而不需要接触它们。在小型部件损坏需要花钱的情况下,例如在制表业或半导体行业,这一点尤其重要。
传统的机器人夹持器容易损坏脆弱的物体。为了解决这个问题,可以使用柔软的橡胶状钳子。虽然这些不会造成损害,但它们很容易被污染,就像橡皮擦一样。此外,这些柔性机器人夹持器只能提供有限的定位精度。
不接触也能抓住:这就是Schuck的“无接触机器人”项目背后的原理。这项技术是基于一种已经被开发了80多年并首次用于太空探索的效应。超声波会产生一种人们看不见或听不见的压力场。压力点是声波相互叠加而形成的,小物体可以被困在这些压力点中。结果,它们似乎在空气中自由漂浮——在一个声学陷阱中。
经济效益
在实验室里安装的是Schuck想要开发的产品的原型:一个使用超声波的电子控制机器人钳子。这位31岁的科学家用3D打印机在两个半球体上安装了许多小喇叭。相关的软件可以让Schuck控制扬声器,这样压力点就可以移动。目标是实时改变它们的位置,而不让悬浮的物体掉到地上。联邦理工学院博士生马克·罗斯利斯伯格(Marc Rothlisberger)正在研究这一特殊的物体,他与Schuck和研究生克里斯蒂安·伯卡尔德(Christian Burkard)在苏黎世科技园区共享一个实验室。
利用现有的技术,科学家们能够在太空中移动各种小物体。该软件根据被举起物体的形状调整夹持器,然后机器人手臂将物体运送到目标位置。
不接触的抓取原理也有经济效益:当与传统机器人一起工作时,几乎每一个新的形状都需要一个不同的夹持器。声学夹持器消除了大量昂贵的高精度夹持器的需要。机器人手臂本身甚至不需要非常精确:“精确的定位是由软件控制的声波决定的。”Schuck解释说。
最初,Schuck想要用他的ETH先锋研究员基金来决定如何在实践中使用机器人夹持器。“主要目的是探索潜在的应用领域,并在行业内打开大门。”Schuck说。这一创新可能会引起制表行业的兴趣,因为在制表行业,高精度的微观力学对于处理昂贵的微小部件至关重要。例如,齿轮先涂上润滑油,然后测量润滑油层的厚度。即使是最轻微的接触也会损坏润滑剂的薄膜。”对于Schuck的技术来说,微芯片生产可能是另一个有吸引力的市场。
Schuck将从15万瑞士法郎的奖学金中拿出一部分,为潜在客户制作一种“开发工具包”。这包括一个机器人夹持器,控制软件和指令。Schuck强调他仍然不知道最终的产品会是什么样子。
“这取决于我从行业得到的反馈。”Schuck希望能找到一些有兴趣的人与他合作,进一步开发声波夹持器。一方面,这将有助于满足现有的市场需求。另一方面,Schuck希望这项技术不仅能在实验室工作,也能在现实世界中发挥作用。如果能在2021年春天实现这一目标,Schuck认为他就能根据自己巧妙的商业创意创办一家初创公司。
原文来源:https://techxplore.com/news/2020-01-robot.html
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)












TOM2022-06-07 09:4006-07 09:40

TOM2022-06-07 09:2806-07 09:28

TOM2022-06-07 09:2306-07 09:23

TOM2022-06-07 09:2306-07 09:23

奇偶记娱乐2022-06-07 09:0606-07 09:06






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>


















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报